PowerPlay
GitHub →This robot was built as part of the FTC 2022-2023 season. I served as the vice president of the team, lead software engineer, and assistant driver.
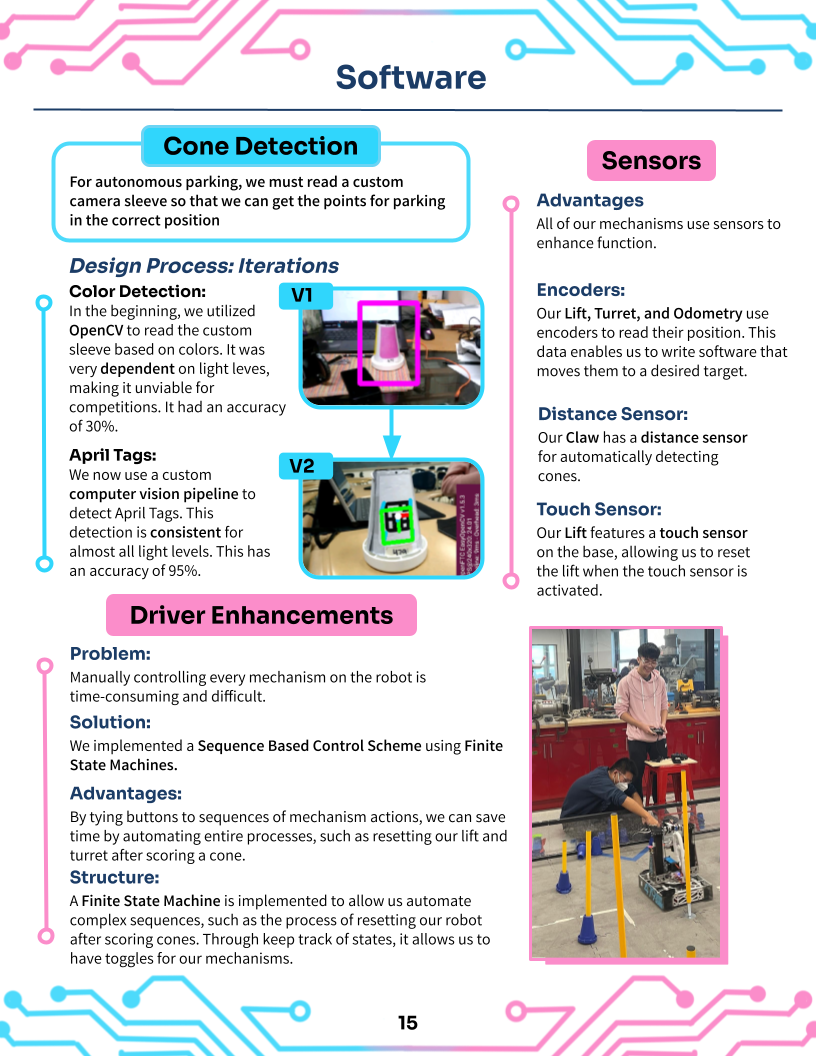
I am most proud of my autonomous routines, which consistently achieved a perfect six-cone autonomous score. At the beginning of each autonomous routine, the robot must select a parking zone based on a randomized orientation of a pre-placed cone using a vision pipeline. I opted to use AprilTags to cleanly localize and detect the cone. A video of the routine is shown below.
I developed most of the software to control the robot in driver mode as well. Here is a page from our portfolio describing the software pipeline.
I also developed our rendering pipeline using Onshape and Fusion 360. Here are some renders we used for promotion.